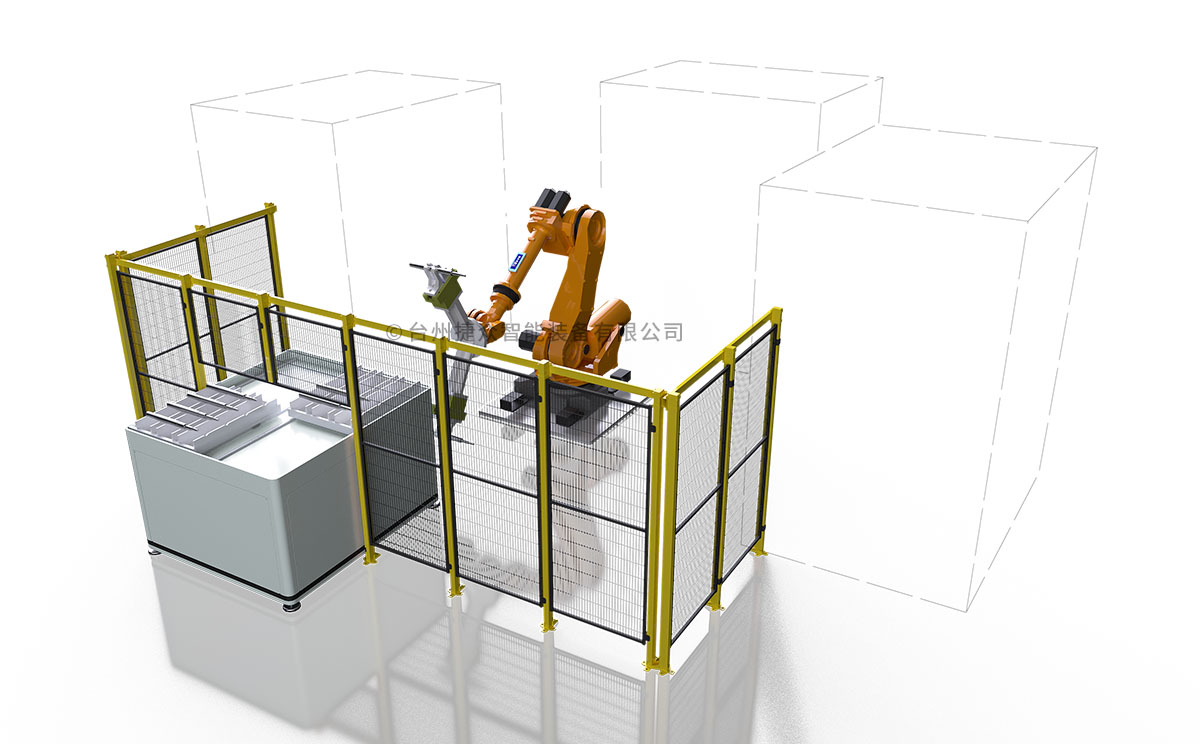
机械手整机调试,夹爪可实现最佳定位
引言:机械手在不同行业的各种制造设备的自动化中发挥了巨大的作用。高速机械手臂可以在短时间内完成繁琐而重复的任务,提高企业的日常生产能力。
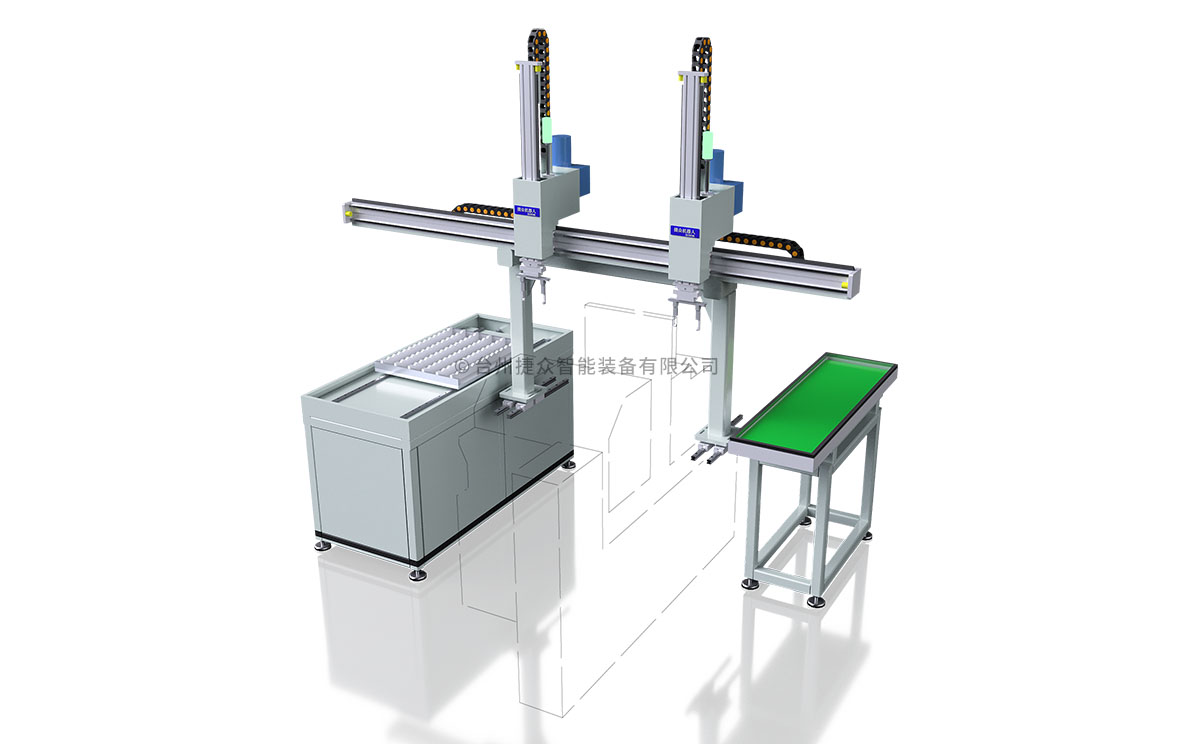
在国内的机械加工中,要实现机床制造过程的完全自动化,并采用集成加工技术,通常会采用自动化机械手,以适用于生产线的上下料、工件翻转、工件转序等。然后,机械手从生产制造到实际应用,还需要经过测试,以及现场的整机调试。
为了提高生产效率,越来越多的公司决定将其机床自动化与机械手结合。正确的自动化系统在这里至关重要。机械手的运动调整和适当的抓取技术在这里起着重要的作用。
机械手实时运动调整
即插即用机械手控制系统是一个模块化系统,适用于大多数机械手品牌,包括ABB、Fanuc和KUKA。其他可以插入的模块集中在运动学和动力学模型上,以建立一个独特的机械手指纹,一个整体的编程和仿真环境和一个高动态补偿机制,以消除剩余的位置误差。

自适应跟踪系统模块由两部分组成:跟踪系统和比较与路径自适应模块。根据具体项目需要,跟踪系统研究将从尼康计量公司的K系列光学坐标测量机开始。
K系列预校准固态摄像机系统由三个线性内置电荷耦合器件(CCD)摄像机组成。当所有摄像机上都有圆柱形透镜,中间摄像机倾斜90度,光学坐标测量机测量安装在机器人头部的红外发光二极管(LED)的位置。在捕获时,由于LED位于3个CCD观测平面相交的位置,因此系统能够根据平面倾角确定点坐标。该系统提供了以高达1000赫兹的采样率同时跟踪多个6自由度LED的方法,以便进行动态测量。
校正自适应模块不断地将测量的位置、速度和加速度与部件程序中的相应数据进行比较。然后,基于模型的算法确定何时以及如何调整机器人操作以满足加工过程所需的精度。尼康计量工程师致力于测量精度、系统延迟和模块接口,以获得精确和迅速的机器人运动适应能力。
夹爪可实现精准定位
另一个重要的核心组件是抓取技术。在这里,使用的是Zimmer Group的夹持模块。例如,每个系统都使用了GD300-C系列的气动三爪夹爪。三爪夹爪由坚固的外壳组成,外壳由硬质涂层铝合金制成。它们由带圆形活塞的双作用气缸驱动。其特点是通过同步的主动导向楔形钩齿轮传动。这样可以通过最佳的驱动力偏转实现较高的抓地力。

三爪夹爪专注于必需品,非常经济的抓爪方式,以降低生产成本。GD300-C抓爪的T形槽导向确保了强大的力和扭矩吸收。它确保了高刚性,并在紧凑的设计中将其与较长的使用寿命结合在一起。在此,也可以通过特殊的装料口从侧面进行自动装料。
第二面的加工不那么广泛,因此花费的时间要少得多,并且在此单独进行。由于第一台机器对于系统循环至关重要,因此必须在加工结束并立即插入四个新毛坯后立即从中取出四个已加工的工件。带有四个工件夹的组合式存放和车削工位用于半成品的中间存储。在这里,机械手将零件放回原处,然后再次捡起来,以装载第二台机器。
我们公司多年来一直以创新的机械手解决方案服务于各个行业。因此,我们了解企业对可靠的制造自动化的需求,以有效地简化其流程。无论您的设备应用是什么,我们公司都可以生产出高质量和稳定的自动化机械手设备,可以应付现代制造业的挑战。请立即联系我们,获取您理想的机械手方案。