数控机床自动上下料机械手设计
引言:本文是通过对自动机械手的调研以及研究,设计出一个能和数控机床相适应的自动上下料机械手,重点对机械手的手爪抓取机构、驱动机构以及控制系统进行设计。
随着工业的发展,科学技术的不断突破以及计算机技术的急速扩张,一些传统的人工的工作由逐步被代替的趋势。在传统的机械加工中,主要依靠人工的操作完成上料、加工、下料的过程。
随着科学技术的发展,数控机床发展迅速,不仅效率高,而且更加自动化,加工时间也正在不断缩短,辅助操作更加精简,同时对工件的加工精度也越来越高。但是,数控机床的上下料作业大多还是手工操作,这种传统的操作方式与数控机床已不能匹配,因此需要研制一种能实现智能控制的自动上下料机械手。
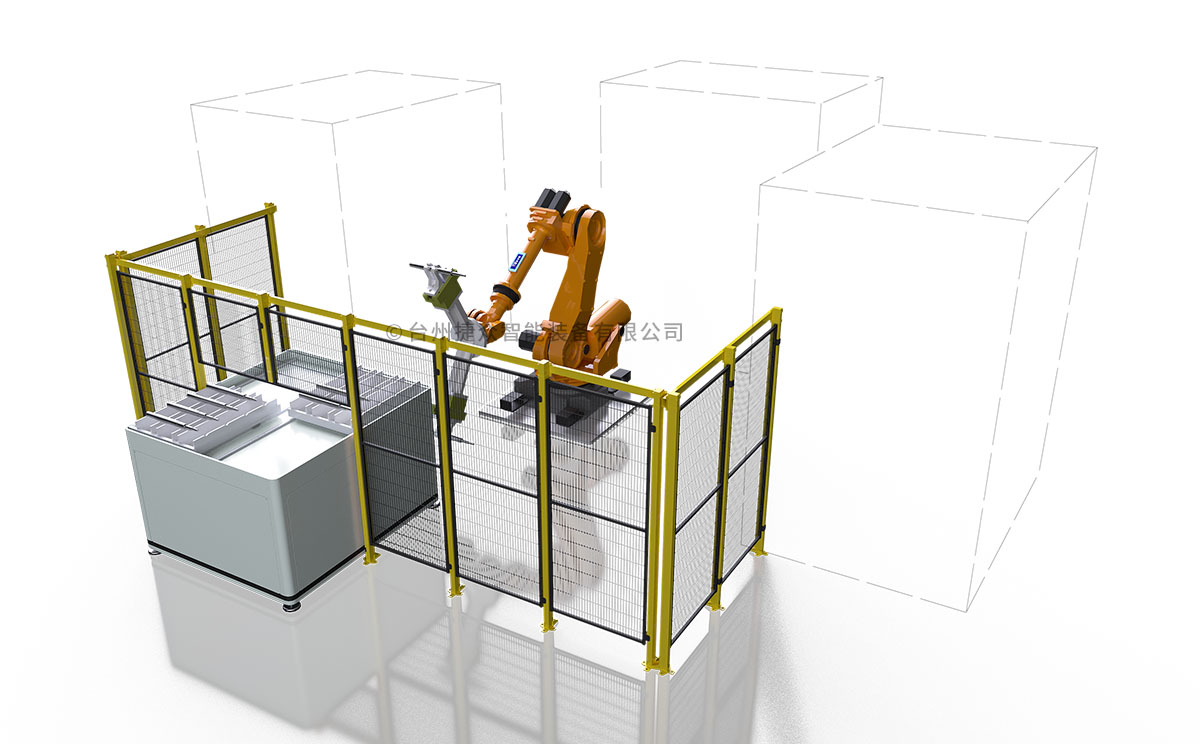
抓取机构
机械手一般都有抓取机构,用来有效抓取和固定待运输的物品,方便运输。一种机械手抓取机构的特点主要包括两个相对设置的支架、安装在每个支架上的机械手、驱动机械手在支架上纵向移动的纵向移动部件、垂直升降的升降部件和相应的控制单元。
")
但现有技术中的机械手抓取机构固定效果差,不能稳定地固定物体,造成运输过程中的危险。因此,在使用中有效地固定物品,提供便于运输、安全性高的机械手抓取机构是自动上下料机械手设计的重点。
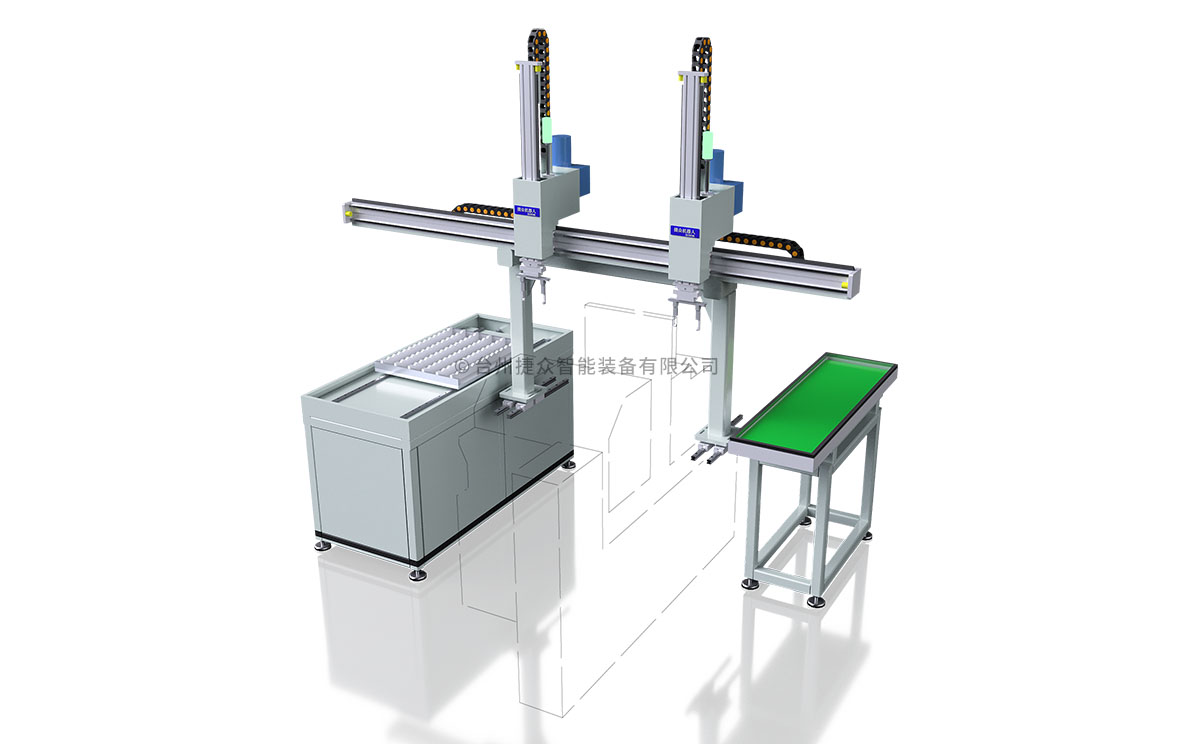
驱动机构
机械手驱动机构主要有气压驱动、液压驱动、电气驱动和机械驱动,其中,以液压驱动、气压驱动为主。该设计为气压驱动。气压驱动系统主要由气缸、气阀、气罐和空气压缩机组成,具有气源方便、动作快、结构简单、成本低、维护方便等特点。
该机械手采用气压驱动,其优点是无需减速机构就可达到高速度,而且工厂内基本都设有压缩工作站。对环境友好,泄漏基本无害。适用于易爆,易燃等恶劣环境。构造简单,维修费用低。可将气缸和摆动气缸作为手臂的一部分,结构简单,刚性好。
")
控制系统
本设计的控制系统采用plc控制,plc控制系统是以传统顺序控制器为基础,引进微电子技术、计算机技术、自动控制技术和通信技术而形成的一代新型工业控制装置,代替继电器、执行逻辑、时间、计数等顺序控制功能其特点是:通用性强,使用方便,适应范围广,可靠性高,抗干扰能力强,编程简单。
近代计算机技术产业革命使世界经济由资本经济进入了知识经济时代。无线电时代也基本已经成为过去式,进入了智能化电子系统时代,主要以计算机技术为中心。同时,机械手控制系统也逐渐与计算机联网,使得机械手控制系统更具智能化,操作更简便。
通过我们对自动上下料机械手设计的大致分析,相信大家对用于数控机床自动上下料机械手有了一定的认识,想要了解更多关于这方面的知识可以关注我们的公众号,更多的机械手视频及机械手设计知识都能在我们的公众号上看到。