工业机器人的手部是什么,通常都有哪些特点
引言:工业机器人是一种普遍用于制造行业的机器设备,通常由机械系统、控制系统以及驱动系统等部分组成,其中的机械系统又由机座、手臂、手腕以及末端执行器这几个部分组成,而所谓的末端执行器,也就是工业机器人的手部。本文将以工业机器人的手部来进行相关内容的介绍。
工业机器人就像一个多才多艺的多功能技术人员,通过可变的运动来移动物件或者工具,以完成各种各样的工作。与其他机器进行通信以及对感官输入做出回应的能力是它的重要属性,这些功能可以使它在本质上更加通用。它涉及到了多个轴的协调控制,并使用专用的数字计算机来作为控制器。
由于它们可以通过编写程序来完成危险或者重复性的工作,因此,工业机器人逐渐被用于各个行业当中。在各个行业的应用中,它可以利用手部来操作执行过程中的工具或者正在执行过程中的工件。下面我们将简单介绍一下工业机器人的手部,以及它的特点。

工业机器人手部
工业机器人的手部是什么
工业机器人的手部是安装在机器人手腕上的一个部件,所要完成的工作大多都是通过手部来进行完成的,通常会用它来抓取物件或者操作工具,按照规定的动作程序来完成指定的工作,其抓紧和松开的动作全部都是自动完成的。
人的手是具有很多关节的多个手指的手,可以完成很多比较复杂的工作,如制作物件、使用工具以及做各种各样的手势等。在工业机器人的手部设计中,由于机构和控制系统方面的局限,难以设计出像人手这样的通用装置;另外,工业机器人的工作要求对大多数工作现场都是有局限的,因此其手部的设计主要是针对指定的工作对象而设计的。
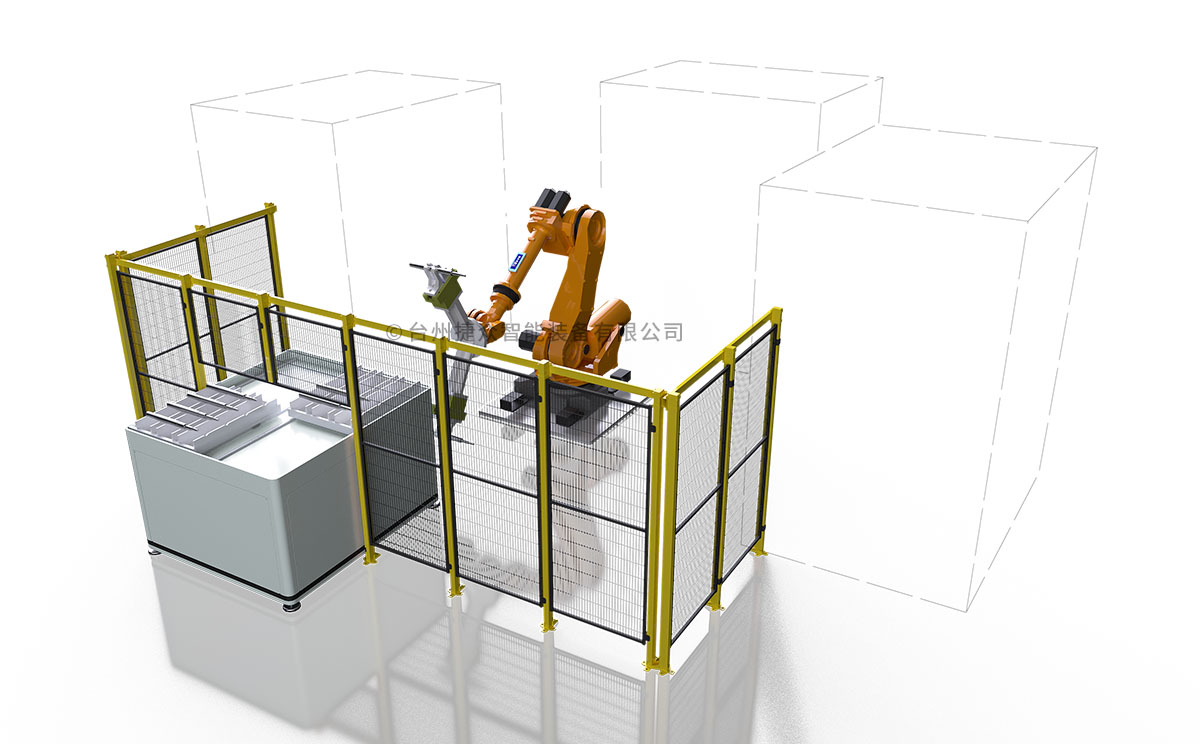
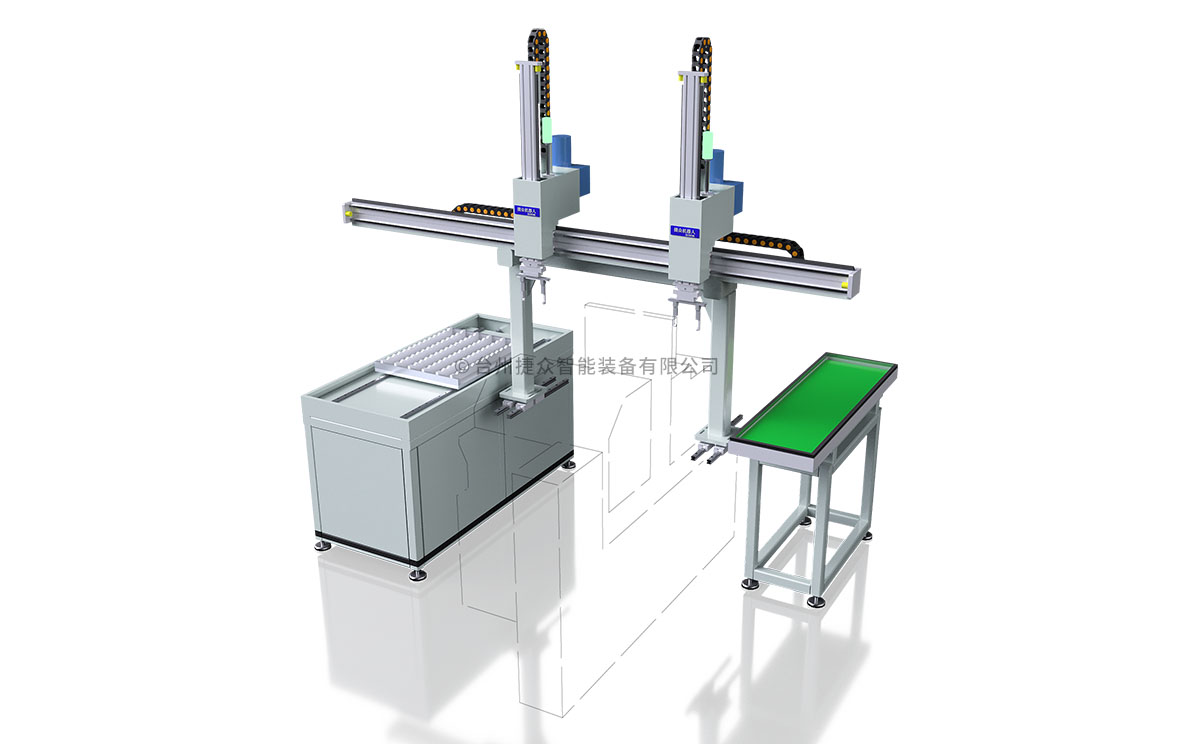
它的手部可以像人手那般有手指,也可以是没有手指的手;可以是类似于人的手爪,也可以是进行专业工作的工具,如码垛机器人使用的手部是可以用来抓取和移动箱子的,这些手部通常是气动夹具或者真空吸盘系统。当然,并非所有的工作都会需要机器人来抓取物件,在焊接工作中,机器人的手腕会安装焊枪来作为手部,合适的手部可以让机器人更好地完成焊接工作。
工业机器人手部的特点
1、有各种手部形式:随之技术的发展,它的手部出现了各种形式,通常有夹钳式、吸附式或者专用和通用手部等,如夹钳式,它是比较普遍的一种手部形式,类似于人的手爪,通常用于装配工作上;吸附式手部,依靠着吸附力来进行抓取物体,适合用在易碎物体;专用式,它是一种进行专业工作的工具,如焊枪、喷漆枪等;通用式,它和人的手比较相似,有两个或者五个手指,可以完成比较复杂的操作。

工业机器人手部
2、可以拆换:手部和手腕相互连接的地方是有机械接口的,根据不同的抓取对象,其手部的结构也会有些许不同。通常一台工业机器人会配备多个手部装置或者工具,因此,当抓取对象发生变化的时候,便可以进行拆卸和更换手部。
3、通用性不好:它的手部一般是一个专用装置,一种手部通常只能用来抓取一种或者多种在尺寸、重量以及形状等方面比较相似的物体,一种工具也只能用来进行一种工作任务,所以其手部的通用性不是很好。
浏览以上文章我们可以了解到工业机器人的手部是一种装置,主要安装在机器人的手腕上,具有模拟人手动作的功能。每一个工业机器人都是需要手部的,如果没有手部,那么工业机器人就没有办法发挥出自己的用处。关注我们,了解更多工业机器人手部的知识。