工业机器人机械手连线项目
应用领域:更多机床系列 发布时间:2022-07-27 10:13:42 浏览:668次

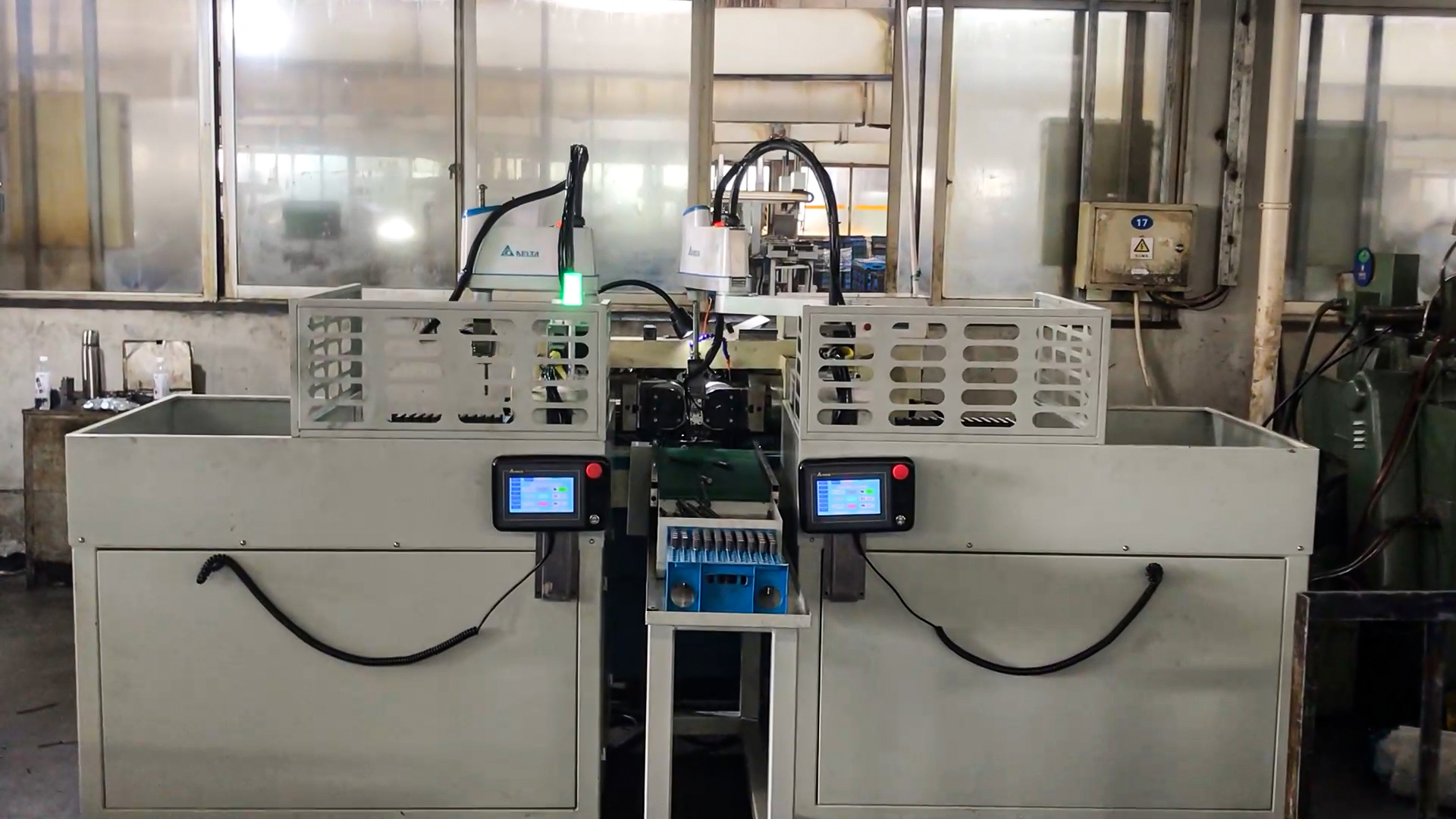
本项目从企业生产的实际需求出发,主要针对电机智能制造系统的在线检测系统、自动搬运系统、自动装夹系统和数字化系统四大方面进行了全面而深入的研究。
具体流程如下:
1、关节机器人在零件提升机上取电机零件毛坯。
2、关节机器人对立车上下料。
3、关节机器人对检测设备上下料,检测零件压装位置尺寸。
4、关节机器人将检测尺寸NG的产品剔除,将检测合格的产品放在压装机定位工装上。
5、一号桁架机械手运行于零件轴压装设备和码放的输送带之间,负责此二者的自动搬运。
6、二号桁架机械手抓取合格的压装后工件输送至一号磨床,完成第一道磨削工序。
7、三号桁架机械手抓取完成第一道磨削工序的工件并掉头,输送至二号磨床,完成第二道磨削工序。
8、四号桁架机械手将完成两道磨削工序的转子轴从二号磨床中取出,运送至车床进行车削加工,并运送至下料输送线进行码放。