工业机器人臂部设计时应注意的基本要求
引言:工业机器人是一类功能跟人手臂相似的机械设备,有着很多个关节,可以沿着轴来进行移动,或者是沿着指定的方向来进行旋转。它有三个主要部分来进行协同工作,如臂部、腕部以及手部,并由放置在工业机器人手臂中的电动机来提供动力。本文将以工业机器人臂部来进行相关内容的介绍。
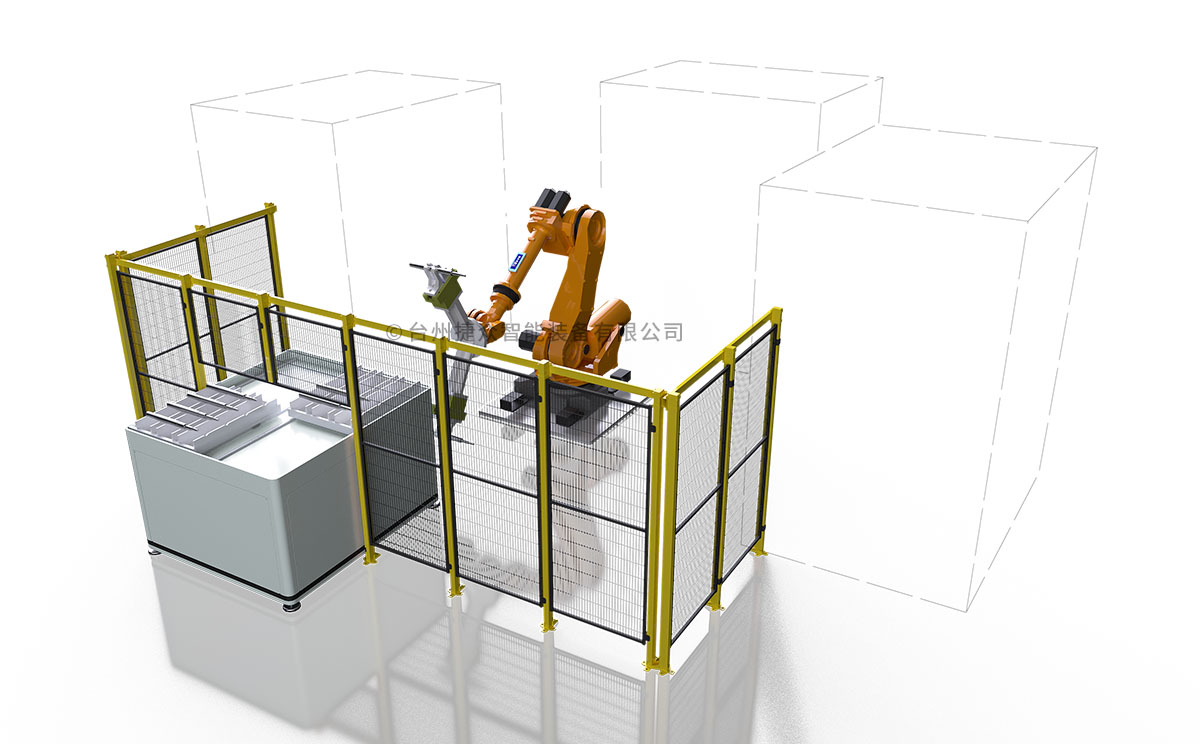
工业机器人通常是由三个部分组成,如执行机构、驱动机构以及控制机构,而执行机构有机座、臂部、腕部以及手部等,其中的臂部是一种由三个自由度组成的机械部件,这三个自由度也就是臂部的伸缩、旋转以及俯仰运动,其臂部的伸缩、旋转以及俯仰运动都可以通过液压、气压、电气以及机械等形式来实现。
如果按照工业机器人臂部的运动形式来进行分类的话,有直线运动、旋转运动以及复合运动等不同的运动形式,而这些运动形式都对应着不同的工业机器人臂部的结构。臂部的直线运动有伸缩、俯仰以及横向或者纵向运动等;旋转运动有左右旋转和俯仰运动;复合运动是不仅有直线运动,还有旋转运动。

工业机器人臂部的作用
臂部是工业机器人比较重要的运动部件之一,通常由大臂和小臂组成,其作用便是将物件运送到指定的位置上,以及支撑腕部与手部(工具)等。工业机器人臂部的运动跟人臂部的运动是不同的,虽然工业机器人臂部关节的自由度比人的臂部少,但它的臂部可以通过更大的角度来进行运动。
工业机器人臂部的作用便是用来支撑腕部与手部(工具)。由于它的臂部不仅要承受手部、腕部以及臂部自身的重量,可能还要承受被抓取物件的重量,所以通常都会使用钢、铝合金来作为臂部的材料,而有的工业机器人还会使用碳纤维来作为臂部的材料。
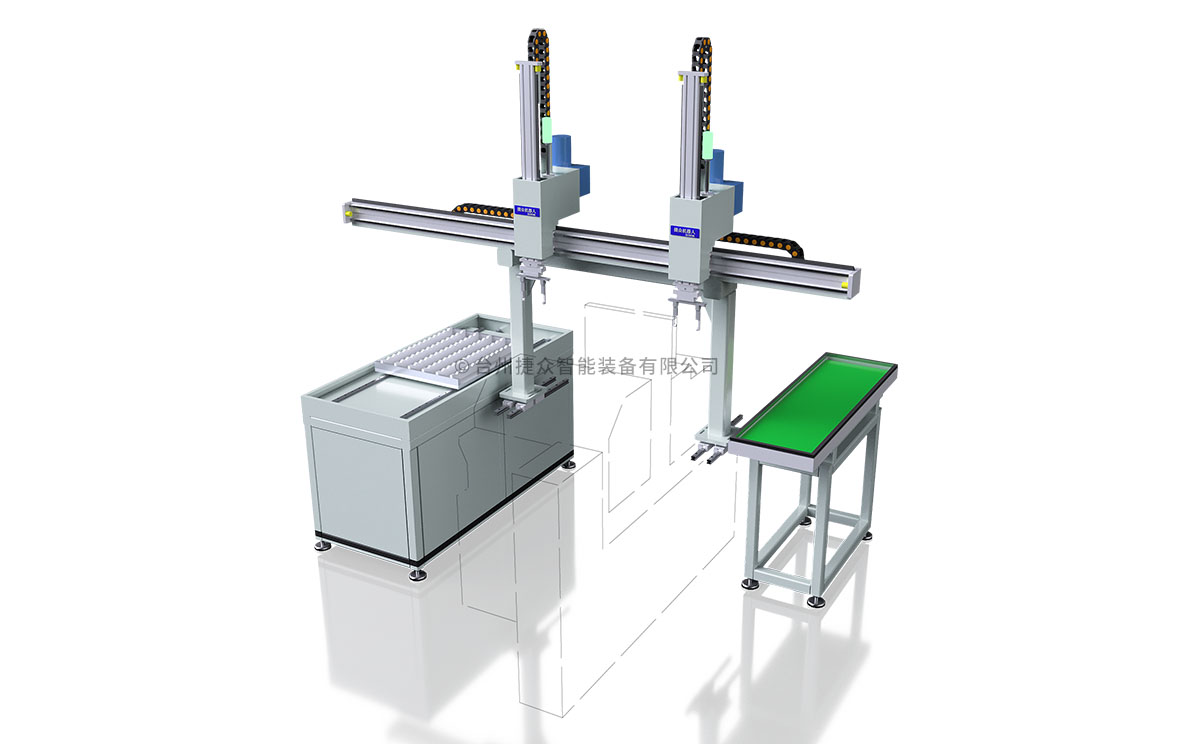
在市面上,工业机器人比较常见的应用场景有很多,如喷漆、焊接、搬运、装配以及检测等,如果是搬运机器人,其臂部的另一个作用便是将物件运送到指定的位置上,所以通常工业机器人的臂部会有三个轴,也就是三个自由度,如臂部的伸缩、旋转以及俯仰运动。臂部可以将手部运送到空间运动范围内任何的一个点上,但如果想要改变手部的姿态,就要用到腕部的自由度,以实现手部各种不同的姿态。
工业机器人臂部设计时的基本要求
1、承载能力要大:承载能力指的是工业机器人在工作时,任何位置和姿势上的承载能力,这不但和工业机器人的负载质量有关,还和工业机器人的运动速度和加速度的大小有关。而工业机器人臂部的作用便是用来支撑手部、腕部,所以设计臂部时,不但要考虑手部、腕部的重量或者被抓取物件的重量,还要考虑运动时的动负载和旋转惯性。
2、刚度要高:为了避免臂部在运动时产生较大的变形,应合理选择臂部的截面形状。工字形截面的弯曲刚度通常要比圆形截面的弯曲刚度高;而空心圆管的弯曲刚度和扭转刚度都要比实心圆管的高很多,所以通常会使用空心圆管来作为臂杆和导向杆,工字钢和槽钢来作为支承板。

3、重量要轻:如果想要提高工业机器人的运动速度,就要尽可能的减轻臂部运动部分的重量,这样可以减小整个臂部对回转轴的旋转惯性。
4、导向性要好:为了避免臂部在直线运动时,沿着运动轴线发生相对旋转,所以要安装导向装置,或者设计花键、方形等形式的臂杆。
5、运动要平稳:臂部的运动速度越高,定位前的惯性力产生的冲击也就越大,这样不但运动不平稳,定位精度也不会很高。所以,在设计臂部时,除了要尽可能的结构紧凑和重量轻之外,另外还要采用一定的缓冲措施。
浏览以上文章可以了解到臂部是工业机器人的执行机构中比较重要的部件之一,其作用便是将物件运送到指定的位置上,以及支撑腕部与手部(工具)等,而臂部的结构、工作范围、承载能力以及定位精度等都会直接影响到它的工作性能,所以在设计臂部时应注意以上的基本要求,以设计出理想的臂部。关注我们,了解更多工业机器人的内容。
下一篇:暂无